Inspired by beavers: Researchers create an autonomous robot that can overcome uneven terrain
09/11/2018 / By Rhonda Johansson
Researchers from the University of Buffalo (UB) have created a new type of autonomous robot that adapts to its environment rather than trying to change it. This design modification takes its cue from beavers, say the researchers, who build structures in response to what is around them rather than following predetermined plans.
Dr. Nils Napp, assistant professor of computer science and engineering in UB’s School of Engineering and Applied Sciences explained, “When a beaver builds a dam, it’s not following a blueprint. Instead, it’s reacting to moving water. It’s trying to stop the water from flowing. We’re developing a system for autonomous robots to behave similarly. The robot continuously monitors and modifies its terrain to make it more mobile.”
The nature-inspired robot was featured in a study recently published in Robotics: Science and Systems. It is hoped that the new building algorithm used by the robots will help emergency response teams work more efficiently.
Machines that govern themselves
Creating robots that work in controlled environments, such as a manufacturing plant, is pretty straightforward. Mathematicians simply have to design algorithms that cover a certain amount of scenarios.
This becomes more difficult in the wild. There are so many factors to consider, with many of them being highly unpredictable and needing more complex formulae.
Napp says that he and his team were able to overcome this challenge by studying stigmergy, a natural phenomenon that describes self-organizing activities employed by insects, animals, and even humans. Stigmergy clarifies how certain behaviors are made seemingly without planning, communication, or mutual awareness.
A classic example of this is how termites build their nests. One termite will deposit a pheromone-laced ball of mud in a certain spot. Attracted by the pheromones, other termites will drop their mudballs in the same spot, creating a large nest.
Humans display the same type of self-organizing behavior as well. Take Wikipedia, for instance. One user will create a page in the encyclopedia, then another will modify it with additional information. This process can continue indefinitely, exponentially building more complex pages.
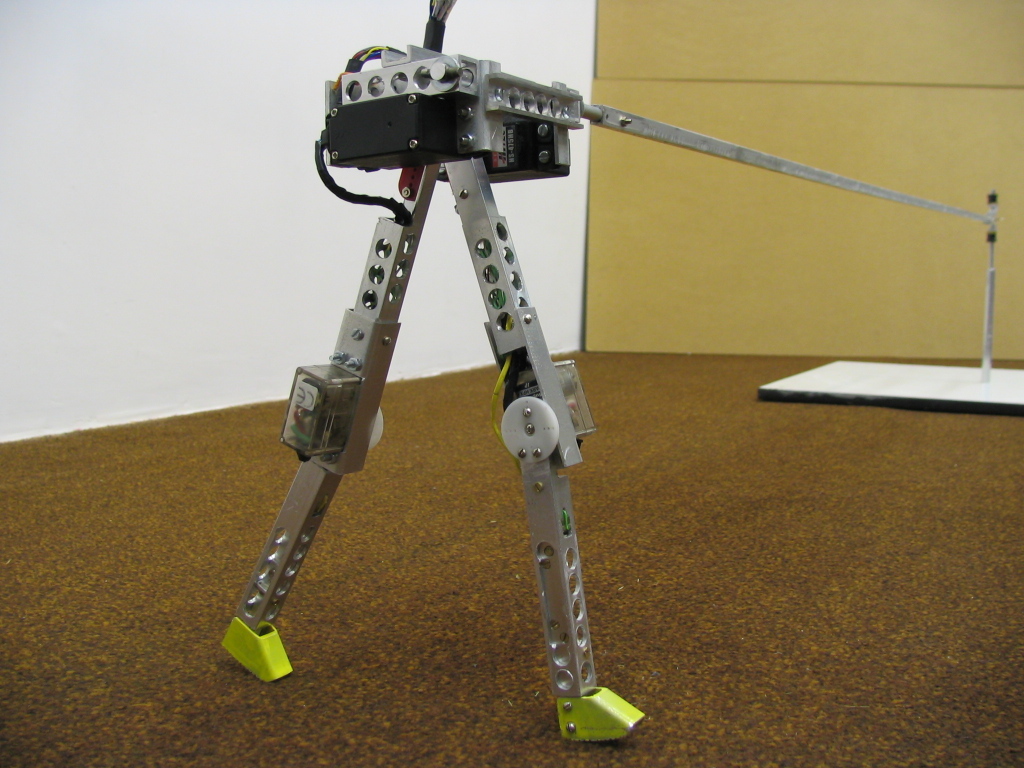
Building on this, Napp created a robot that observed and analyzed its environment before making any sort of decision. The mini-rover was outfitted with a camera, custom software, and a robotic arm capable of lifting and depositing heavy objects.
The team then created a mock terrain, with randomly placed rocks and broken bits of concrete to simulate a post-disaster environment. Hand-sized bean bags of different sizes were also placed around the area.
The robot, with its new algorithms, was seen picking up the bean bags and depositing them in holes and gaps in between the rocks and concrete. It eventually built itself a ramp so that it could reach its target location.
This behavior excited the researchers. Napp enthused that the their robot was able to take cues from the surroundings, displaying an ability to continually learn.
“That means it can fix mistakes and react to disturbances…Just like an animal, the robot can operate completely by itself, and react to and change its surroundings to suit its needs.”
Robots in disaster scenarios
These findings have significant implications in many disaster management strategies. Many researchers hope to make autonomous rescue robots as the first line of response after an emergency situation. However, one of the main challenges in achieving this goal is the inability of robots to work themselves around and in hazardous environments. (Related: Human-like Terminator rescue droids to become our “fourth emergency service” in 50 years.)
To read more stories on the latest technological advancements, visit Robotics.news.
Sources include:
RoboticsProceedings.org [PDF]
PDFs.SemanticScholar.org [PDF]
Tagged Under: AI, artificial intelligence, autonomous rescue robots, autonomous robots, disaster management, emergencies, emergency droids, emergency response robots, emergency services, rescue droids, robots, self-governing behavior, stigmergy
RECENT NEWS & ARTICLES